
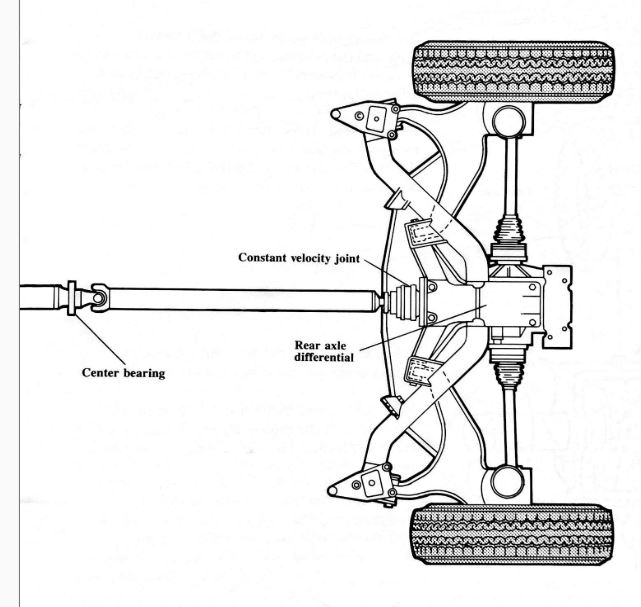
 The Syncro all wheel drive uses three differentials, one for each drive axle and an additional one between the front and rear axles. It is this center differential, which is integrated into the transmission, that provides the Syncro’s outstanding handling characteristics.
The Syncro all wheel drive uses three differentials, one for each drive axle and an additional one between the front and rear axles. It is this center differential, which is integrated into the transmission, that provides the Syncro’s outstanding handling characteristics.
In contrast with other designs, all four wheels on the Syncro are driven constantly. An advantage is realized because when a wheel is driven, there is always a certain amount of slip between the tire and the road surface, even when the road is completely dry.
If the amount of force a wheel must transfer to the road becomes less, the slip is less. As tire slip decreases, total power transfer can be increased, providing improved traction. On the Syncro, engine power is divided among all four wheels, rather than between just two, decreasing this unwanted slip. There is only a slight increase in
friction because a transfer case is not used. But, because tire slip is less, these frictional losses are more than compensated for.
 The all wheel drive feature minimizes the tendency of the car to lose traction on wet roads, maintaining directional stability and steering control.
The all wheel drive feature minimizes the tendency of the car to lose traction on wet roads, maintaining directional stability and steering control.
In addition, both the center and rear differentials are capable of being locked. However, because high steering effort would result, the differential at the front axle cannot be locked.
 In order to fully understand the Syncro all wheel drive and the operation of the differential locking devices, it is important to understand how a differential works.
In order to fully understand the Syncro all wheel drive and the operation of the differential locking devices, it is important to understand how a differential works.
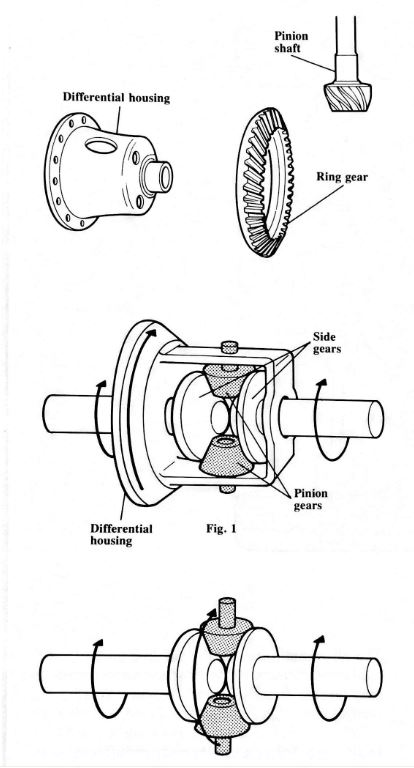
The pinion shaft receives engine power from the transmission and drives the differential ring gear. Because the ring gear is bolted to the differential housing, the two rotate together.
When the differential housing rotates, the two pinion gears and their shaft also rotate. (Fig. 1)
Because the two differential side gears are meshed with the pinion gears, the side gears must also rotate. They drive the axles and the car moves.
When the car is going straight ahead, there is no difference in speed between the two drive wheels and no differential action need occur. (Fig. 2)
 However, when the car negotiates a turn, the differential must compensate for the difference in travel and thus RPMs of the two wheels. If, for example, the driven wheels are rigidly connected, the inside drive wheel would have to match the greater speed of the outside wheel.
However, when the car negotiates a turn, the differential must compensate for the difference in travel and thus RPMs of the two wheels. If, for example, the driven wheels are rigidly connected, the inside drive wheel would have to match the greater speed of the outside wheel.
This would result in the inside wheel slipping or scrubbing on the road, resulting in poor ride and excessive tire wear. The differential prevents this.
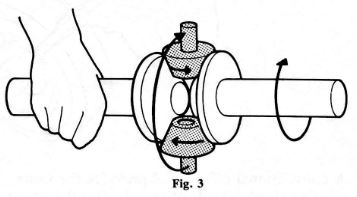 When the car is going through a turn and the differential housing rotates, the pinion gears rotate on their shaft (Fig. 3). This occurs because the pinion gears must walk around the slower turning differential side gear connected to the inside wheel. This means they carry additional rotary motion to the faster-turning outer wheel during the turn. So, as the car is turning, the differential can compensate for the speed difference between the two wheels, resulting in optimum traction and ride quality.
When the car is going through a turn and the differential housing rotates, the pinion gears rotate on their shaft (Fig. 3). This occurs because the pinion gears must walk around the slower turning differential side gear connected to the inside wheel. This means they carry additional rotary motion to the faster-turning outer wheel during the turn. So, as the car is turning, the differential can compensate for the speed difference between the two wheels, resulting in optimum traction and ride quality.
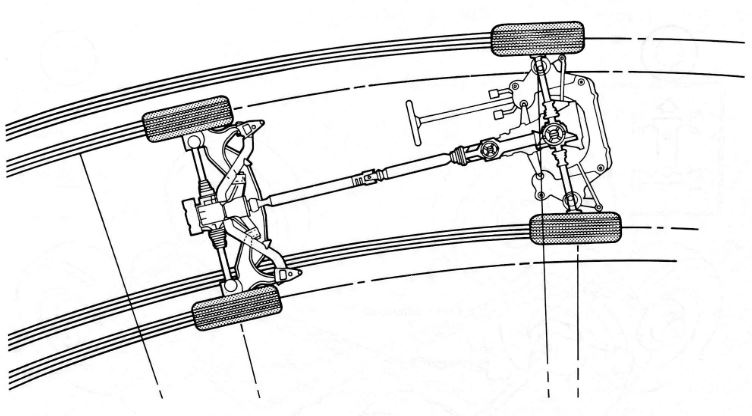
Because the Syncro has full time all wheel drive, it is advantageous to have three differentials because during turns, not only do the outside wheels travel further than the inside wheels but the front wheels travel further than the rear wheels.